|
|
はしる トーマス |

![]() 機関車のおもちゃは、 いつの時代も子供のあこがれです。
機関車のおもちゃは、 いつの時代も子供のあこがれです。
私が子供だった頃は特にモノのない時代で、 おもちゃなんて満足に買ってもらえせんでした。
裕福な友達の家には電気機関車のおもちゃがあって、
ずっしり重くてピカピカ光る機関車がとても羨ましかったものです。
…この歳になっても、 おもちゃの機関車というと無性にほしくなるのは、 その頃の思い出のせいかもしれません。
しかし、 「はしる トーマス」 に惹かれたのは、 ノスタルジアではなく、 そのユニークさのためでした。
付属のローラーに水を入れて、 専用マットの上で転がすと水色の線路が簡単に描けます。
ペンで線を書くこともできます。
そうして書いた線路や線の上に トーマス を置くと、 その線路や線に沿って トーマス が走りだします。
本物の機関車でもおもちゃの機関車でも、 機関車といえば敷かれたレールの上を走りますが、
「はしる トーマス」 は "描かれた線路" の上を走ります。
しかも、 水で描いていますから、 しばらくすると消えてしまいますが、
消えたらまた重ね書きしてもいいし、 新たに別の線路を描いてもいい。
ハードウェアであった線路が、 ここではなんと、 ソフトウェアです。
描いた線の上を走るおもちゃ なら、 やっぱり光センサでしょ。
とまぁ、こう思っていたのですが、 分解してみると予想は見事に外れていました。
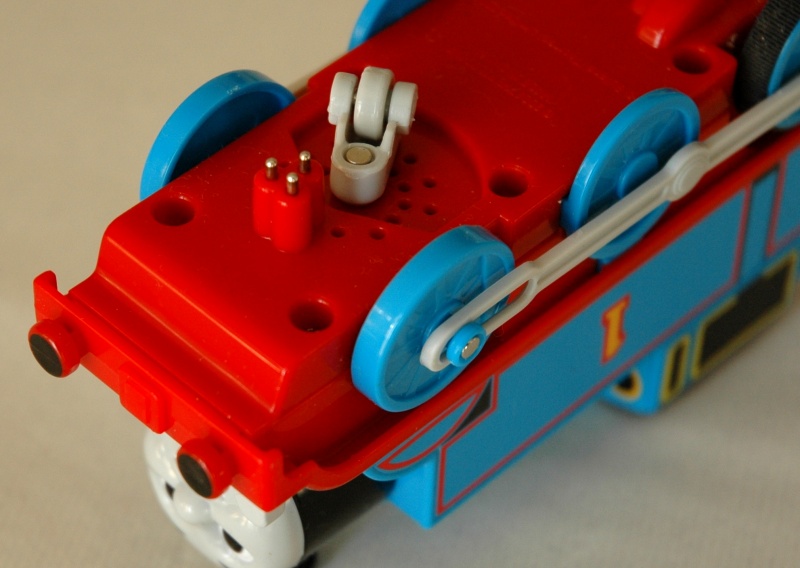
![]() 左の写真の円内はトーマスのセンサ (電極) です。
左の写真の円内はトーマスのセンサ (電極) です。
水で描かれた線路を、 抵抗値の変化で検出します。
頂点 (写真では右側) の共通電極と、左、右、3つの電極が三角形に配置されています。
左の写真をクリックすると、 大きい写真が表示されます。
以下、 マウスの指アイコンがある写真は同様。
モーターは、 左右の車輪を独立して駆動するために2個あります。
共通電極と左の電極が一瞬でも濡れたシートに触れると、 まず右側のモーターが約9秒間動いて
(この間、左のモータも微妙な動きをしますが、 これについては後述)、
次いで左側のモーターが約9秒間動きます。
右の電極と共通電極が濡れたシートに触れた場合も、 左右が逆になるだけで、動きは同じです。
三つの電極がすべて濡れた部分に触れると、 左右のモーターが同時に回るので、 トーマスは直進します。
約 18 秒間、 電極が濡れた部分に触れなければ、 トーマスは停止します。
![]() シートが濡れているかどうかを検出するのなら CMOS でしょ、
静電気の保護回路でもつけて… と思いましたが、これも外れ。
シートが濡れているかどうかを検出するのなら CMOS でしょ、
静電気の保護回路でもつけて… と思いましたが、これも外れ。
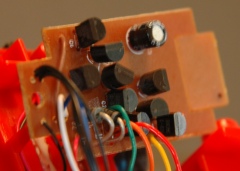
プリント基板の部品面です。
トランジスタが9個ありますが、4個はモーター、1個はスピーカーのドライブに使われていて、
残り4個がセンサの回路にあてられています。
モーターやスピーカーなら分かりますが、 センサ信号の入力回路までトランジスタとは!
しかもリード線つきの、挿入型のトランジスタです。
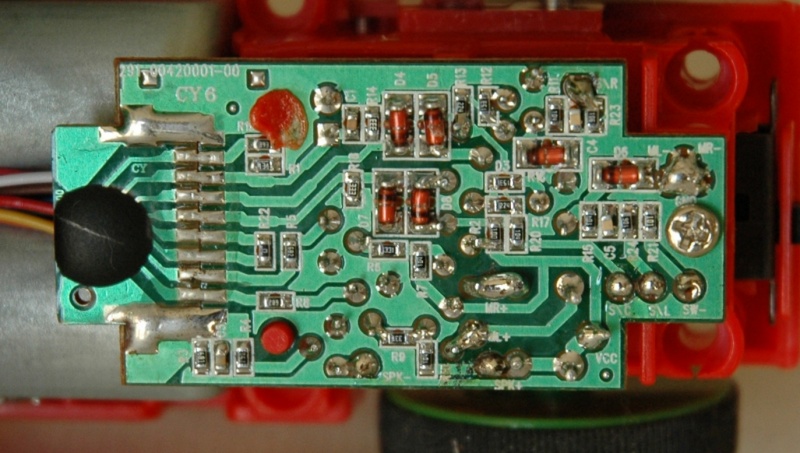
![]() というのも、 こちらは基板の半田面ですが、
LSI や表面実装型の抵抗、 コンデンサなどが、 このように表面実装されているからです。
というのも、 こちらは基板の半田面ですが、
LSI や表面実装型の抵抗、 コンデンサなどが、 このように表面実装されているからです。
トランジスタ9個とその他の部品くらいなら収まりそうです。
ただ、 部品面にはリード線もたくさんあります。
これらは手作業でしょうから、 ついでにトランジスタも…、 なのかも知れません。
MAID IN CHAINA というのは、 やはり凄いと思います。

![]() 機関車はトーマス、 ポピー、 ジェームスの 3 種類あります。
機関車はトーマス、 ポピー、 ジェームスの 3 種類あります。
それぞれ音楽や、 シュシュポッポー という音と、 「ぼく、トーマス!」 という声も出します。
音声のデータは LSI に書き込まれていますが、 トーマス、 ポピー、 ジェームス用に、
それぞれ専用の LSI があるとは考えにくい、
多分ジャンパーの設定などで切り替えるのだろうと思うのですが、 基板上にはそれらしいものが見あたりません。
さて、描いた線路の上を走っていく仕組みですが…。
いま、 線路が一本の線で (下図左)、
あるいはハシゴ状に (右) 描かれているとき、
右の接点が線路から外れたとします。
一本の線上を走っているとき (A) は左に進めばいいのですが、
ハシゴ状の線路の場合は、右に進むべきとき (B) と、
やはり左に進めばいいとき (C) があります。
B の場合でも、 左に進めばすぐに左側の線路が見つかるので、 それでも特に不都合はないでしょう。
ちょっと、 左に寄ってるかな、 というだけで、 直進しても構いません。 大きな事故には至りません。
左のセンサが ON になると、 LSI からは上図左のようなモーター制御信号が出力されます
![]() 。
。
先ず、 右のモーターが約 9 秒間 ON になりますが、 その間、
左のモーターも間欠的に (ほぼ 1.4 秒おきに 0.3 秒間) ON になるので、
トーマスは 「左回り、 でもときどき直進」 という動きになります。
その後の 9 秒間は左のモーターだけが ON になって、 トーマスは右回りです。
つまり、 まずは左に行ってみて、 それでもダメなら右に行ってみよ〜、 という、 じつにおおらかな行動をするわけです。
右のセンサが ON になると、 上図右のような信号が出力されて、
左右の関係が入れ替わっただけの、 全く同様の動きになります。
左のセンサも右のセンサも ON であれば、 当然、 トーマスは直進します。
線路の端までやってきて、 線路がなくなったことに気がつくと、
トーマスはどちらのセンサが最後まで ON であったかによって決まる方向に回転し、
線路を見つければそこで直進、 見つからなくても、 逆方向に回ってまた線路を探します。
こうして、 線路の端までやってきても、 トーマスは U ターンして走り続けます。
約 9 秒は、 この U ターンに必要な時間なんでしょう。

線路をペンで描くだけでいいので、
組み立てなくてはならない普通の機関車のおもちゃに比べると簡単です。
対象年齢は3歳以上となっていますが、 私の孫娘 (2.5歳) もお気に入りです。
自分でせっせとペンに水を入れては、 「シュシュポッポー」。
毎日のように、 「ぼく、トーマス!」 という声が聞こえてきます。
2006.02.13
![]()